











CR100系列运动控制器概述


一、产品介绍
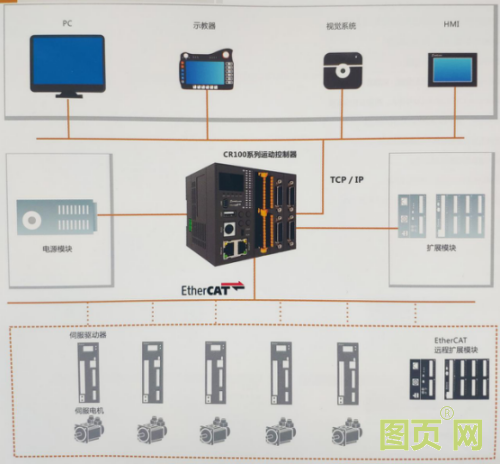
CR100系列开放式运动控制平台是深圳市显控科技股份有限公司推出的融合运动控制和逻辑控制于一体的模块化嵌入式控制平台,采用1Ghz超高速CPU与FPGA大规模逻辑的完美融合,具有9轴插补联动的优秀控制算法与编译型PLC逻辑指令,同时兼容EtherCAT总线和高速脉冲控制,具备多端口连接功能,与,与具备编程、调试及应用于一体的上位调试SamProIDE成套使用。CR100系列开放式运动控制平台是深圳市显控科技股份有限公司完全独立自主研发,未包含任何版权费,具有超高性价比,真正将稳定的品质、优质的服务和自主可控的技术不断为客户创造价值。
二、产品特点
l 多轴插补联动控制
基于Linux实时操作系统,采用多任务并行处理机制,支持XYZABCUVW最大9轴插补联动,支持空间直线,空间圆弧,样条曲线等插补,支持连续小线段G64插补,支持反向间隙补偿,螺距误差补偿,刀具补偿等功能,支持Z脉冲回零,二次回零等模式,同时兼容G代码编程和梯形图编程。
l 模块化扩展及可编程映射策略
提供数字量、模拟量、轴控、高速脉冲、总线等模块,根据设备需要,可灵活编程及组合,快速升级迭代,最大程度节约系统成本。
l 编程、调试及应用于一体的上位软件SamProIDE
编程、调试及应用于一体的上位软件SamProIDE
l 编译型软PLC与运动控制的结合
采用编译型PLC指令,超快速扫描周期,最小指令周期1ns,可使用简单的梯形图指令编程运动控制功能
l 开放式系统方案
支持USB、串口、网口Ethernet等上位机系统连接方案(包括PC和HMI),提供包括寄存器在内的开放式接口,构建开放式系统平台
l EtherCAT主站
采用FPGA实现的EtherCAT主站协议栈,达到±20ns实时特性的业内顶尖水平,结合SamProIDE编程软件,构建编程、监控及调试于一体的EtherCAT主站方案


█ 目前支持的型号如下:
|
型号 |
卡槽1 |
卡槽2 |
卡槽3 |
|
CR100-CMMM |
M |
M |
M |
|
CR100-CPMM |
P |
M |
M |
|
CR100-CPXX |
P |
X |
X |
|
CR100-CPTT |
P |
T |
T |
|
CR100-CPXT |
P |
X |
T |
|
CR100-CPXA |
P |
X |
A |
|
CR100-CPTA |
P |
T |
A |
其中CPMM支持2路高速脉冲输出和2路高速脉冲输入,频率200KHZ,PXX,PTT,PXT,PXA,PTA支持6路高速脉冲输出和6路高速脉冲输入,频率200KHZ。
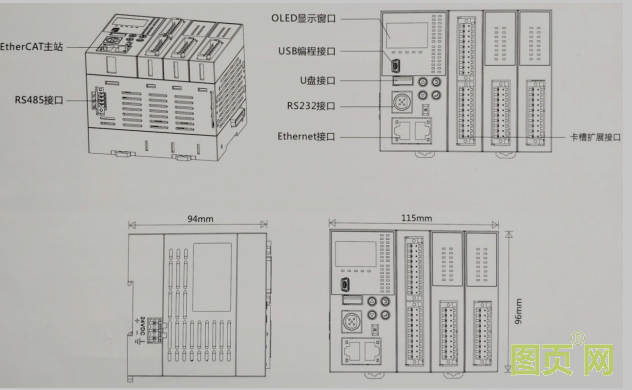
三、硬件接口与尺寸
四、控制器规格
|
项目 |
说明 |
|
结构与环境 |
|
|
尺寸(mm) |
115x96.5x94 |
|
重量(g ) |
200 |
|
工作环境温度 |
0℃~55℃(无冻结) |
|
工作环境湿度 |
5~95%RH(无冷凝) |
|
防震度 |
10~25HZ(XYZ方向 2G/30分钟) |
|
外壳材料 |
工程塑料ABS+PC |
|
电源 |
|
|
功耗(W ) |
10 |
|
供电电源 |
DC24V±15% |
|
IO部分 |
外部DC24V |
|
静电等级 |
3级±6KV |
|
运动控制 |
|
|
脉冲频率 |
轴控模块差分最高4Mhz,IO模块最高200KHZ |
|
运动功能 |
支持单轴点动JOG、连续轨迹运动 |
|
插补曲线 |
空间直线、空间圆弧、螺旋线、样条曲线、NURBS曲线插补 |
|
连续插补 |
多段缓冲,G64连续小线段插补 |
|
误差补偿 |
螺距误差补偿、反向间隙补偿和刀具半径补偿 |
|
回零方式 |
支持Z脉冲回零、二次回零等方式 |
|
变速功能 |
运动过程中变速,倍率设置、启动暂停等功能 |
|
G代码仿真 |
G代码3D轨迹、梯形图离线和在线仿真功能 |
|
G代码导入 |
CAD、文字、图片导入生成G代码功能 |
|
机器人 |
机器人在线和离线仿真功能,坐标系切换功能 |
|
核心部分 |
|
|
CPU |
1GHZ主频+大规模FPGA逻辑 |
|
操作系统 |
Linux多任务处理 |
|
RAM空间 |
512MBytes |
|
FLASH空间 |
2GBytes eMMC |
|
掉电储存空间 |
全寄存器区域掉电保持 |
|
通信部分 |
|
|
EtherCAT |
1路、EtherCAT主站,最短设置系统周期500us |
|
Ethernet |
1路、10/100MBPS、Modbus TCP协议、网口下载及监视 |
|
RS232 |
1路、1200~115200bps、Modbus协议/自由口协议 |
|
RS485 |
2路、1200~115200bps、Modbus协议/自由口协议 |
|
U盘 |
1路、G代码文件拷贝 |
|
USB |
1路、USB下载及监视 |
五、运动控制器的软件特点:
n 支持系统接口参数配置和面向大规模硬件组态配置;
n 支持PLC梯形图离线仿真和在线监视;
n 支持运动控制参数一键化配置;
n 支持面向高级语言的G代码编辑、仿真及运行监控;
n 支持EtherCAT主站XML文件导入,配置及在线监视;
n 支持图片,文字和CAD转化为动作G代码;
n 支持各类寄存器在线示波器实时监控;
n 支持运动控制快速调试面板;
n 支持G代码轨迹3D在线和离线仿真;
n 支持USB、串口、网口和U盘上下载工程及文件。
六、运动控制器接线图与应用场景



 手机图页网
手机图页网



